Photogrammétrie : principes de fonctionnement, méthode et cas d’usage
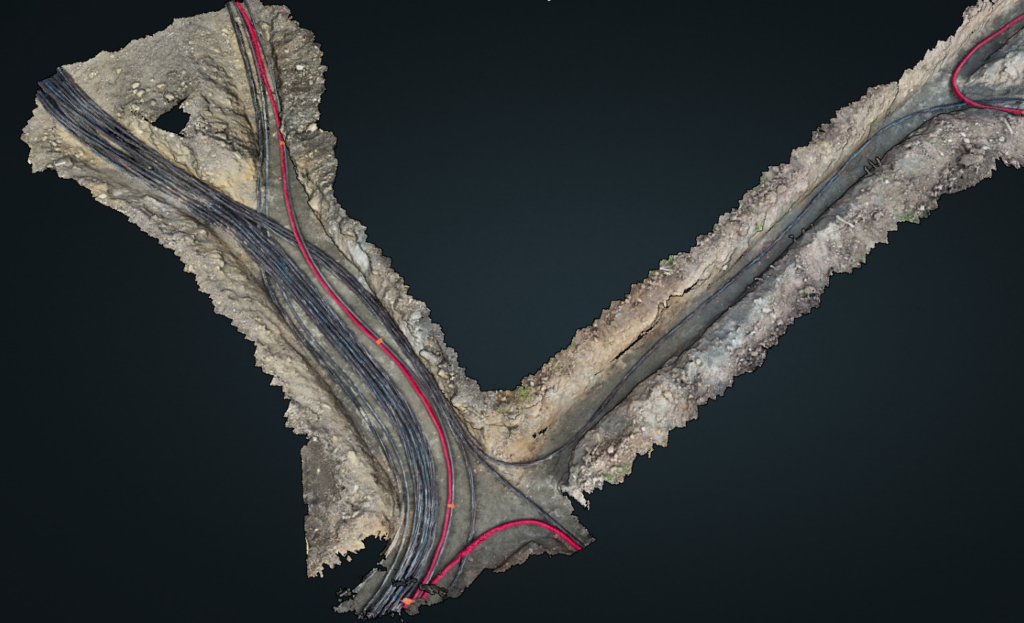
Qu’est-ce que la photogrammétrie ? La photogrammétrie est une technique de restitution 3D à partir d’images 2D. Concrètement, elle permet de modéliser le terrain avec une grande précision, sans contact, en exploitant le principe de parallaxe entre plusieurs images prises sous des angles différents. Historiquement, elle a d’abord été utilisée en géomatique. Aujourd’hui, cette méthode trouve des applications concrètes dans les domaines de la topographie, des travaux publics et de la gestion des réseaux. De son côté, Syslor exploite la photogrammétrie à partir de captations vidéo réalisées directement sur le terrain par les utilisateurs via l’application EasyScan, depuis un smartphone ou une tablette. Ensuite, ces vidéos sont traitées pour produire des orthophotos et modèles 3D exploitables dans notre portail de visualisation et de vectorisation. Enfin, cet article propose de détailler les principes de base de la photogrammétrie, ses étapes clés, les livrables générés ainsi que ses principaux cas d’usage terrain. Types de photogrammétrie (analytique, numérique) Selon l’évolution des techniques et des outils disponibles, la photogrammétrie peut être mise en œuvre de différentes manières. On distingue principalement deux approches, qui se différencient par le degré d’automatisation et les méthodes de calcul utilisées : Photogrammétrie analytique : basée sur des calculs géométriques manuels ou semi-automatisés. Photogrammétrie numérique : entièrement informatisée, elle repose sur des algorithmes d’appariement et de traitement d’images. Comment fonctionne la photogrammétrie ? Au-delà de son principe théorique, la photogrammétrie repose sur une chaîne de traitement bien structurée qui permet de transformer de simples images en données géométriques exploitables. Depuis l’identification automatique de points communs jusqu’à la génération d’orthophotos et de modèles 3D, chaque étape contribue à garantir la précision et la cohérence du résultat final. Voici les grandes étapes de ce fonctionnement : Appariement des points homologues Le logiciel identifie automatiquement des points identiques (points homologues) présents sur plusieurs images, généralement en utilisant des méthodes de corrélation ou de détection de features. Concrètement, cela évite à l’opérateur de relever manuellement chaque détail et garantit une base solide pour reconstruire le chantier en 3D. Notion de parallaxe et triangulation La différence d’angle entre les images permet de calculer la position 3D de chaque point par triangulation. Ce calcul mathématique se traduit sur le terrain par un modèle 3D précis de la tranchée ou de la surface relevée, directement exploitable pour mesurer des distances, des profondeurs ou vérifier l’emplacement des réseaux. Conditions de recouvrement (avant/latéral) Pour obtenir un modèle cohérent et complet, il est nécessaire d’assurer : Un recouvrement avant (overlap) d’au moins 70 % entre deux images consécutives, Un recouvrement latéral (sidelap) d’au moins 30 % entre deux lignes de vol. En pratique, cela signifie que les opérateurs doivent filmer ou photographier de manière régulière et structurée, ce qui garantit que le logiciel pourra reconstruire fidèlement chaque portion du chantier sans zones manquantes. Étapes du traitement photogrammétrique Alignement des images : reconnaissance des points communs et orientation relative. Génération du nuage de points 3D : dense, structuré, précis. Production du MNT/MNS : extraction des surfaces topographiques. Orthophotographie : projection plane, sans distorsion, géoréférencée. Export des données : formats standards pour l’intégration SIG/DAO/CAO. Quels sont les livrables issus d’un traitement photogrammétrique ? Orthophoto Image géoréférencée en projection plane, sans distorsion, utilisable comme fond de plan pour des implantations ou des relevés. C’est l’équivalent d’un “plan photo” du chantier, utilisable comme fond de plan fiable pour tracer les réseaux et produire un récolement conforme. Modèle numérique de surface (MNS) / Modèle numérique de terrain (MNT) MNS : inclut les objets visibles en surface (végétation, bâtiments). MNT : représente uniquement la surface du sol, sans obstacle. Nuage de points 3D Résultat de la triangulation, il permet de reconstruire finement le relief, les structures et les volumes. Pour l’utilisateur, cela équivaut à disposer d’une copie numérique du terrain, sur laquelle il peut revenir à tout moment pour effectuer des mesures ou justifier ses travaux. Export SIG / DAO / CAO Les données peuvent être exportées aux formats standards (.tif, .las, .dxf, .shp, .gml, etc.) pour intégration dans des logiciels de DAO ou de SIG. À quoi sert la photogrammétrie sur le terrain ? La photogrammétrie est particulièrement utile dans : Les relevés de surface à grande échelle, même dans des zones difficilement accessibles. La visualisation du contexte chantier : topographie, accès, obstacles, interfaces. Le marquage réseau et le plan de récolement : les orthophotos permettent d’intégrer visuellement les réseaux relevés. La vectorisation sur portail métier : comme dans l’interface Syslor, l’orthophoto sert de support au tracé précis des réseaux. La photogrammétrie appliquée au récolement des réseaux enterrés Dans le cadre du récolement des réseaux enterrés, la photogrammétrie apporte une réponse efficace aux exigences réglementaires et opérationnelles. En pratique, à partir de vidéos ou d’images prises lors de l’ouverture de tranchées, il est possible de générer des orthophotos géoréférencées et des nuages de points 3D qui documentent précisément l’état du terrain et la position des ouvrages posés. Par la suite, les données sont ensuite intégrées dans les environnements SIG, DAO ou CAO via des formats standards (.tif, .las, .dxf, .shp, .gml), garantissant leur exploitation par l’ensemble des acteurs du projet. Associée à un calage GNSS centimétrique (RTK/NRTK) ou à des points de contrôle terrain (GCP), cette méthode assure une précision absolue conforme aux exigences du récolement. Les apports de la photogrammétrie dans ce contexte sont multiples : Preuve des dégâts : l’orthophoto sert de constat objectif en cas de dommages aux réseaux ou d’incidents liés aux travaux. Traçabilité et historique : chaque intervention est documentée et archivée, offrant une base fiable pour le suivi des ouvrages. Prévention des dommages : la connaissance précise du sous-sol et des réseaux déjà en place limite les risques lors de futures opérations. Valorisation patrimoniale : la donnée produite enrichit les bases cartographiques et facilite la gestion des infrastructures à long terme. En combinant la photogrammétrie aux mesures GNSS centimétriques, il est ainsi possible de produire un récolement exhaustif, précis et pouvant servir de référence en cas de contrôle ou de litige, répondant aux enjeux de sécurité, de conformité
Photogrammétrie : principes de fonctionnement, méthode et cas d’usage Read Post »
