Le positionnement GNSS est utilisé dans de nombreuses applications professionnelles, notamment en topographie, en travaux publics ou pour la gestion des réseaux. Il repose sur des constellations de satellites et des méthodes de calcul complexes permettant de déterminer une position précise. Décryptage du fonctionnement des systèmes GNSS et des causes courantes de dégradation de la précision.
GNSS : au-delà du GPS
Le terme « GPS » est souvent utilisé à tort pour désigner l’ensemble des technologies de positionnement par satellite. En réalité, le GPS n’est que l’un des systèmes disponibles. Le terme approprié est GNSS (Global Navigation Satellite System), qui regroupe l’ensemble des constellations actives :
GPS (États-Unis)
GLONASS (Russie)
GALILEO (Union Européenne)
BEIDOU (Chine)
Certaines régions bénéficient également de systèmes locaux complémentaires, comme QZSS au Japon.
Principes de calcul de position
Un récepteur GNSS calcule sa position à partir de la distance mesurée entre lui et plusieurs satellites. Chaque satellite émet en permanence un signal contenant des informations temporelles précises. En mesurant le temps mis par ce signal pour atteindre le récepteur, on peut en déduire une distance. Ce processus est appelé trilatération.
Pour déterminer une position complète (latitude, longitude, altitude) et corriger le décalage d’horloge du récepteur, au moins quatre satellites sont nécessaires. L’utilisation de constellations multiples permet d’augmenter le nombre de satellites visibles et donc la précision et la fiabilité du positionnement.
Contenu des signaux GNSS
Chaque satellite émet un signal composé de plusieurs éléments. Ces structures de signal sont définies dans la spécification officielle du système GPS, IS-GPS-200, publiée par le Département de la Défense des États-Unis :
Données de navigation : incluent les paramètres orbitaux et les corrections d’horloge.
À quoi servent les éphémérides ?
Les éphémérides sont des données orbitales que chaque satellite GNSS transmet dans ses messages de navigation. Elles décrivent la trajectoire du satellite sur une période donnée et sont indispensables au récepteur pour reconstituer la position exacte du satellite au moment de l’émission du signal.
Il en existe deux types :
Les éphémérides diffusées, calculées par les centres de contrôle GNSS, transmises en temps réel dans les signaux satellites.
Les éphémérides précises, produites par des organismes comme l’IGS (International GNSS Service), utilisées pour des traitements plus exigeants en précision, notamment en post-traitement.
Une erreur dans les éphémérides peut entraîner une erreur de positionnement allant jusqu’à plusieurs mètres. Leur qualité est donc un paramètre essentiel dans tout calcul GNSS précis.
Les éphémérides précises sont notamment produites par des organismes comme l’IGS (International GNSS Service), qui fournit des données orbitales et temporelles de référence utilisées dans les solutions PPP.
Code pseudo-aléatoire (PRN) : permet d’identifier le satellite et de calculer le temps de parcours du signal.
Onde porteuse : signal radiofréquence servant de support aux autres données.
La distance satellite–récepteur peut être calculée de deux manières :
Par le code PRN, avec une précision de l’ordre du mètre.
Par la phase de l’onde porteuse, avec une précision centimétrique, mais nécessitant des traitements complexes pour lever les ambiguïtés (cycle slips, nombre entier de cycles, etc.).
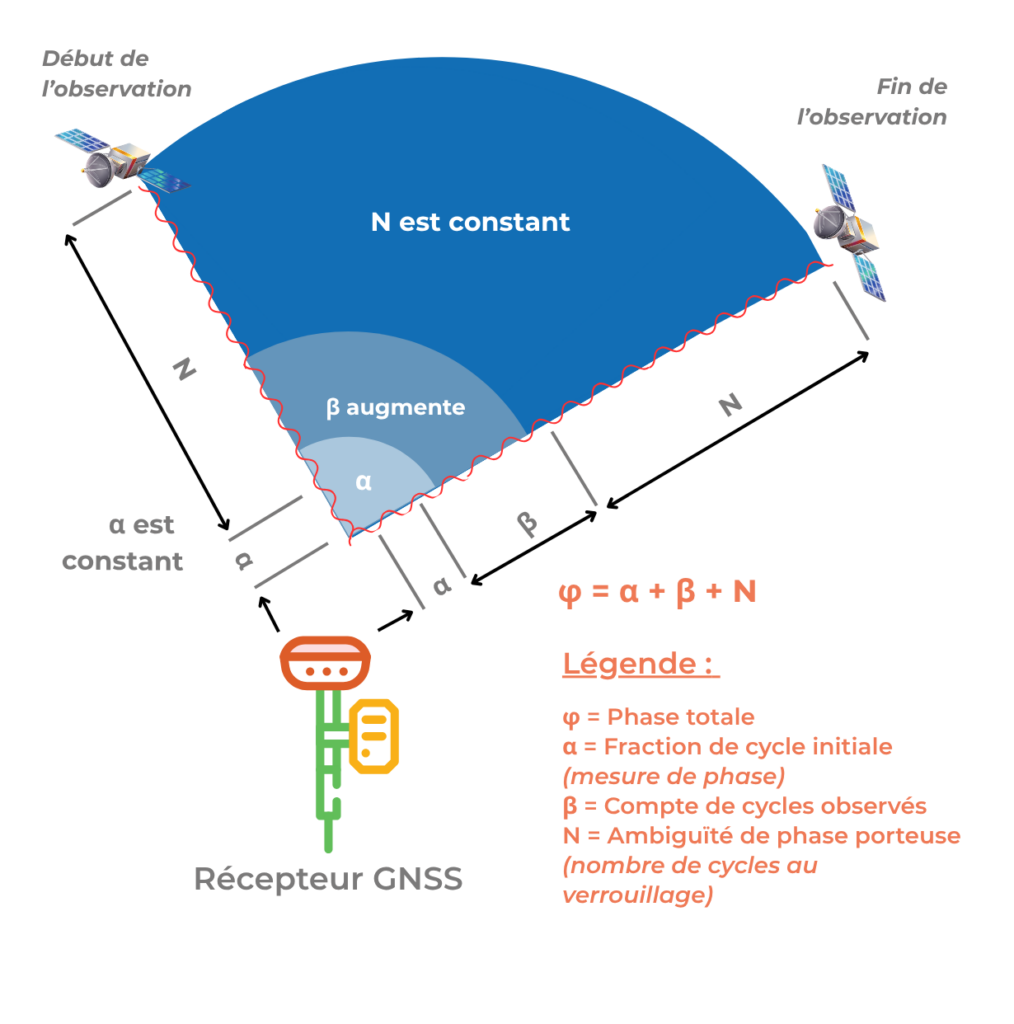
Comprendre l’ambiguïté de la phase porteuse
La mesure de la phase d’une onde porteuse permet d’atteindre une précision bien supérieure à celle obtenue par le code. Cependant, elle présente une particularité : le récepteur peut mesurer la phase reçue, mais ne connaît pas le nombre exact de cycles entiers parcourus entre le satellite et lui. C’est ce qu’on appelle l’ambiguïté de phase.
Pour convertir la mesure en une distance absolue, il est donc nécessaire de « résoudre l’ambiguïté », c’est-à-dire estimer correctement ce nombre de cycles entiers. Cette opération est cruciale dans les techniques de positionnement comme RTK ou PPP, où la précision dépend directement de la qualité de cette résolution.
Un mauvais « fix » de l’ambiguïté conduit à une erreur systématique pouvant atteindre plusieurs centimètres, voire plus. D’où l’importance des algorithmes embarqués dans les récepteurs haut de gamme, capables de détecter, modéliser et corriger ces incertitudes.
La résolution d’ambiguïté est largement documentée dans la littérature, notamment dans le Springer Handbook of GNSS (Teunissen & Montenbruck, 2017), ouvrage de référence sur le sujet.
Principales sources d’erreurs GNSS
Plusieurs facteurs influencent la précision du positionnement. Les erreurs peuvent provenir :
Des satellites :
- Erreurs d’horloge : bien que les satellites soient équipés d’horloges atomiques, des dérives minimes peuvent engendrer plusieurs mètres d’écart.
Erreurs d’orbite : des écarts subsistent entre la position théorique du satellite et sa position réelle.
De l’atmosphère :
- Délai ionosphérique : causé par les particules chargées dans la haute atmosphère, dépend des conditions solaires.
Délai troposphérique : causé par l’humidité et la pression dans les basses couches de l’atmosphère.
Du récepteur :
- Dérive de l’horloge interne
Erreur liée à l’environnement local : effet multi-trajets, obstacles, interférences.
Les cycle slips, une source d’erreur intermittente mais critique
Un cycle slip correspond à une rupture brutale dans le suivi de la phase d’une onde porteuse par le récepteur GNSS. Cela se produit généralement lorsqu’un obstacle temporaire (véhicule, bâtiment, végétation) bloque ou perturbe le signal, même brièvement.
Lorsque la liaison est rétablie, le récepteur reprend la mesure de phase, mais l’ambiguïté précédente n’est plus valable : il faut la réestimer. Si cette détection est mal faite, elle peut entraîner une erreur invisible mais durable.
Les récepteurs performants, comme Proteus, disposent de mécanismes de détection automatique des cycle slips et peuvent relancer les algorithmes de résolution d’ambiguïté en conséquence. Leur gestion efficace est déterminante dans les environnements complexes (urbains, forestiers, chantiers encombrés).
- Précision du traitement du signal : dépend de la qualité du matériel et des algorithmes utilisés.
| Type d’erreur | Origine | Ordre de grandeur |
|---|---|---|
| Dérive d’horloge satellite | Segment spatial | jusqu’à 3 m |
| Erreur d’orbite | Segment spatial | ±2,5 m |
| Délai ionosphérique | Atmosphère (50–1000 km) | 5 à 50 m |
| Délai troposphérique | Atmosphère (0–12 km) | 2 à 10 m |
| Multi-trajets | Récepteur/environnement | variable (mètres) |
| Bruit de mesure interne | Récepteur | centimétrique à décimétrique |
Amélioration de la précision : corrections GNSS
Pour atteindre une précision centimétrique, le positionnement GNSS doit être corrigé. Plusieurs techniques existent selon les besoins et les conditions d’utilisation :
RTK (Real Time Kinematic) NRTK (Network Real Time Kinematic) : utilise une ou plusieurs bases fixes de référence pour corriger les mesures en temps réel. Le format de données différentielles utilisé pour transmettre ces corrections suit en général la norme RTCM 10403.3, largement adoptée dans les systèmes GNSS professionnels
- Base/Rover : utilise une base mobile pour corriger les mesures en temps réel. Cette technique requiert de bonnes connaissances topographiques pour sa mise en place.
- PPP (Precise Point Positioning) : utilise un modèle mathématique pour corriger les erreurs. Les temps de convergence vers une solution précise sont plus long qu’avec du RTK. Le PPP repose sur des modèles d’orbite et d’horloge d’une grande précision, souvent fournis par des services comme l’IGS (International GNSS Service)
- Post Traitement : enregistrement des mesures GNSS brutes et retraitement des observations à posteriori. Ce mode de fonctionnement est incompatible avec du temps réel.
Les techniques de correction peuvent être appliquées localement ou transmises à distance. C’est là qu’intervient le protocole NTRIP (Networked Transport of RTCM via Internet Protocol), qui permet d’acheminer les corrections, comme celles du RTK, via une connexion Internet entre un serveur de correction et un récepteur GNSS.
Le récepteur GNSS Proteus de Syslor est compatible avec les réseaux de corrections temps réel. Il intègre également des filtres pour compenser les erreurs liées aux effets de propagation ou aux pertes de signal momentanées.
Utilisation dans l’écosystème Syslor
Pour garantir des performances optimales à ses utilisateurs sur le terrain, Syslor a choisi de rendre son récepteur GNSS Proteus compatible avec les corrections NRTK. Le couplage de cette technologie et de son récepteur permet d’acquérir des données de terrain précises et une exploitation cartographique immédiate et fluide.
Optimiser la précision GNSS sur le terrain
Même avec un équipement performant et des corrections en temps réel, plusieurs facteurs peuvent continuer à affecter la qualité du positionnement. Voici quelques bonnes pratiques à mettre en œuvre pour maximiser la fiabilité des mesures GNSS :
Surveiller l’activité ionosphérique : les conditions spatiales (orage magnétique, activité solaire intense) peuvent dégrader temporairement les signaux GNSS. Il est recommandé d’éviter les périodes d’activité ionosphérique élevée pour les relevés de précision.
Utiliser une source de correction fiable : la qualité de la correction RTK (ou NRTK) est un facteur clé. Veiller à disposer d’une couverture réseau stable, d’un abonnement à un service reconnu, et d’un protocole de transmission (comme NTRIP) correctement paramétré.
Effectuer des contrôles terrain réguliers : il est conseillé de réaliser une première observation en début de chantier, puis une seconde en fin de relevé pour valider la stabilité des mesures. Ce double passage permet de détecter d’éventuelles dérives ou erreurs ponctuelles.
Ces bonnes pratiques, combinées aux capacités du récepteur Proteus, contribuent à sécuriser la précision des données collectées, même dans des environnements contraints.
Éviter les erreurs courantes en levé GNSS
Même les équipements de pointe ne compensent pas des erreurs de manipulation. Voici un rappel de certaines erreurs fréquentes sur le terrain, et comment les éviter :
Effet multipath (rebond)
Des signaux GNSS peuvent être réfléchis par des surfaces (véhicules, bâtiments, eau, sol), faussant la mesure.
Bonnes pratiques :
Éviter les structures métalliques proches,
Utiliser une antenne avec plan de masse intégré,
Surélever le récepteur autant que possible.
Désalignement du niveau à bulle
Une canne mal verticale affecte la précision.
À faire :
Vérifier régulièrement le niveau sur une structure verticale,
Réaliser deux observations en faisant pivoter la canne de 180° pour compenser,
Utiliser un récepteur avec compensation d’inclinaison intégrée si disponible.
Ligne de base trop longue
Plus la distance entre la base et le rover augmente, plus les erreurs atmosphériques diffèrent.
Recommandation : utiliser une station de base locale pour réduire la ligne de base si possible.
Problèmes de systèmes de coordonnées
Sans localisation correcte, vos mesures peuvent ne pas s’aligner avec un jeu de données existant.
Solution : effectuer un calibrage local à partir d’au moins 4 points connus.
Incohérence des unités
Une mauvaise unité (pied/mètre) peut fausser tout le levé.
Vérifier systématiquement l’unité associée au système EPSG choisi.
Hauteur d’antenne mal renseignée
Une mauvaise référence pour la hauteur du récepteur introduit une erreur systématique.
Vérifier la référence demandée (point de base, bas du récepteur, centre de phase, etc.).
Confusion entre géoïde et ellipsoïde
Le GNSS mesure la hauteur par rapport à l’ellipsoïde, mais les altitudes utiles sont orthométriques.
Sélectionner un géoïde approprié (ex. : RAF20 en France) pour corriger cette différence.
Conclusion
Pour aller plus loin
Ce contenu s’appuie sur les principes définis dans les spécifications GNSS et sur les travaux publiés par des organismes de référence dans le domaine. Pour approfondir, retrouvez ci-dessous quelques sources utiles :
- IS-GPS-200 – Specification for the GPS Interface, U.S. Department of Defense – GPS.gov
RTCM 10403.3 – Standard for Differential GNSS Services – RTCM.org
IGS (International GNSS Service) – igs.org
Teunissen, P. J. G., & Montenbruck, O. (2017) – Springer Handbook of Global Navigation Satellite Systems